Q-Scout y sus sensores
4. Ahora empecemos con lo nuevo: Los sensores
4.2. Sensor ultrasónico y los bloques condicionales
Los bloques de programación que necesitaremos para utilizar este sensor lo encontraremos en el área de “bloques de construcción” y dentro de la sección llamada “sensores”. Allí encontraremos el bloque “valor de sensor ultrasónico (cm) del puerto 1” (el valor del puerto debemos cambiarlo en función de donde hayamos conectado nuestro sensor en la placa de nuestro robot.

Este sensor nos arroja un valor en cm que corresponde a la distancia en la que se encuentra un objeto u obstáculo frente a él.
Condiciones para utilizar el sensor ultrasónico
Como ya sabemos el sensor ultrasónico mide la distancia (en centímetros) que hay entre nuestro robot y un obstáculo enfrente de èl, y que hay un bloque específico que almacena ese valor . Podemos comparar ese valor con cualquier otro que definamos y según necesitemos.
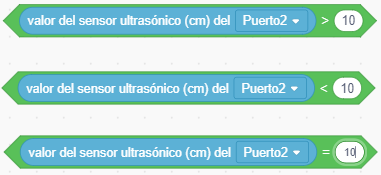
Podemos preguntar si la distancia a la que está el obstáculo es mayor, menor e igual a 10 cm y como resultado de cualquiera podemos tener dos posibles valores (verdadero o falso).
Ahora ¿cómo hacemos si queremos establecer rangos de distancias?. Muy fácil, combinamos operadores relacionales y lógicos. Por ejemplo, si queremos establecer un rango de distancias entre 10 y 20, lo tenemos que hacer de la siguiente manera.
Este rango está conformado por las distancias mayores a 10 y menores a 20. Es decir, que si el valor que arroja el sensor es 15 el resultado de esa combinaciòn seria VERDADERO, ahora bien, si arrojarà 23 el resultado sería FALSO.
Ahora eso que aprendimos lo vamos a utilizar en los bloques condicionales.

Esto se interpreta de la siguiente forma:
SI LA DISTANCIA A LA QUE SE ENCUENTRA EL OBSTÁCULO ESTÁ ENTRE 10 Y 20 CM ENTONCES QUE VAYA HACIA ADELANTE Y SINO QUE SE DETENGA.