Q-Scout y sus sensores
4. Ahora empecemos con lo nuevo: Los sensores
4.3. Sensor siguelíneas y los boques condicionales
Como ya se dijo anteriormente, el sensor siguelìneas nos sirve para que nuestro robot pueda detectar líneas negras sobre un fondo blanco o viceversa, lo que lo hace ideal para proyectos de robótica que involucren el seguimiento de líneas en pistas específicas.
En este caso es más fácil escribir las condiciones ya que en la versión para PC nos vamos a limitar a utilizar el siguiente bloque.
Vamos a suponer que tenemos un escenario blanco con una línea negra para que siga nuestro auto robótico.

Ante este escenario se nos puede presentar 4 situaciones:
Que ambos sensores infrarrojos detecten que están sobre la línea negra. En este caso nuestro robot debe seguir avanzando.
Que el sensor derecho detecte que está sobre la superficie blanca y el sensor izquierdo sobre la línea negra. En este caso nuestro robot debe girar levemente hacia la izquierda para mantenerse en el camino.
Que el sensor derecho detecte que está sobre la línea negra y el sensor izquierdo sobre la superficie blanca. En este caso nuestro robot debe girar levemente hacia la derecha para mantenerse en el camino.
Que ambos sensores infrarrojos detecten que están sobre la superficie blanca. En este caso nuestro robot se debe detener para que una persona lo vuelva a colocar sobre el camino.
Un programa básico para que el robot siga la línea podrían ser el siguiente:
Anidando bloques condicionales

Sin anidamiento de bloques condicionales

Pero si tenemos que trabajar desde el celular no tendremos ese magnífico bloque. Para poder utilizar el sensor siguelineas tendremos que ocupar el bloque “Valor del sensor siguelineas del puerto 2” que lo encontraremos dentro de la sección de sensores.
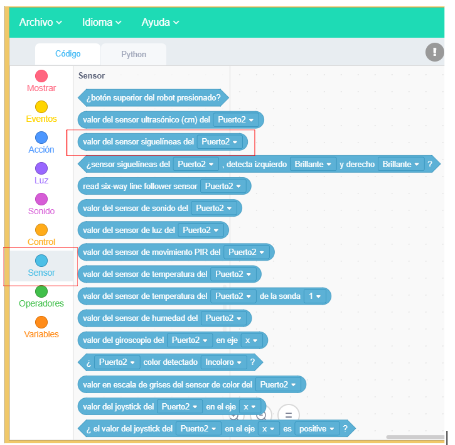
Este bloque puede tomar cuatro posibles valores según lo detecte el sensor (recordar que está compuesto por dos pares de sensores infrarrojos). Estos pares nos permiten 4 alternativas de detección a ser programadas:
0 - Ambos pares detectan negro.
1- El par izquierdo detecta negro y el derecho blanco.
2- El par derecho detecta negro y el izquierdo blanco.
3- Ambos pares detectan blanco.
La programaciòn quedaría de la siguiente forma:
Anidando bloques condicionales

Sin anidar bloques condicionales
